Perception and Decision Making Intergration for Autonomous Driving
Our main focus is on researching 2D image perception and multi-sensor 3D surround perception methods. We aim to explore solutions that integrate perception and decision making end-to-end and create a universal framework for autonomous driving. Our goal is to advance autonomous driving technology into a new phase.
Representative Work:
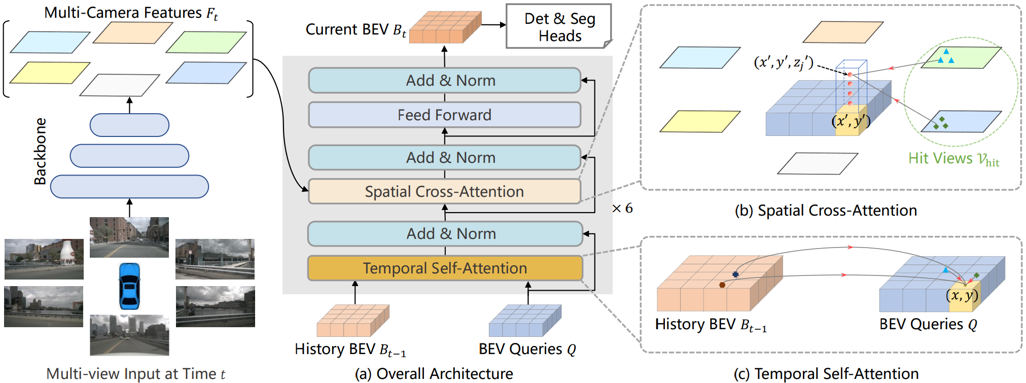
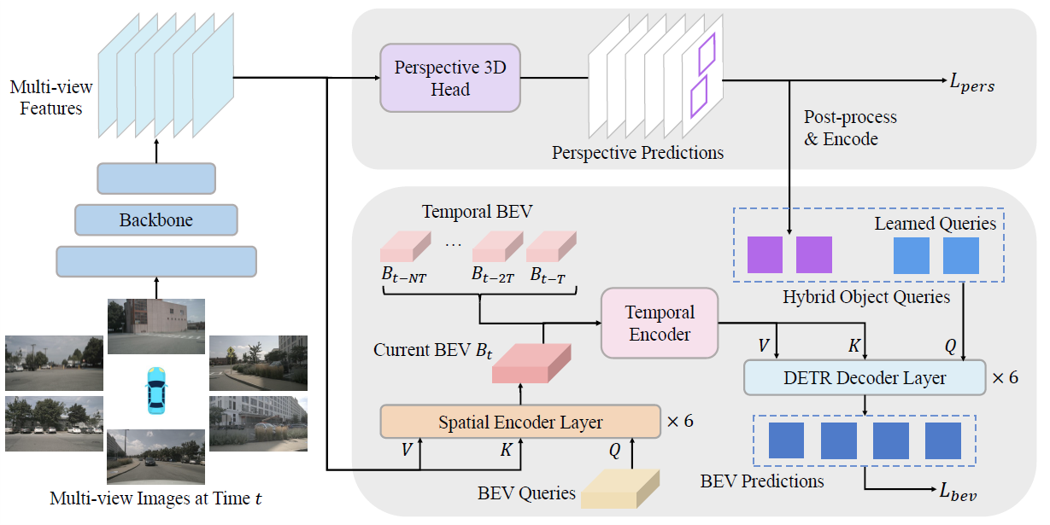
Generic Framwork for Bird’s-Eye-View (BEV) Recognition, Unified BEV Feature and Model Optimization
- [ECCV 2022 6th most influential paper] [The 100 most cited AI papers of 2022] [Ranking 1st on Waymo 2022]

- [CVPR 2023 highlight paper]
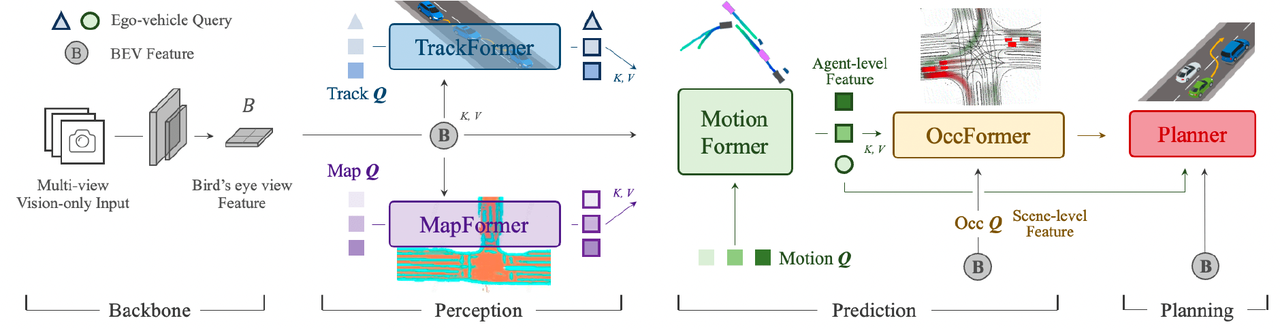
End-to-end Autonomous Driving Framework with Perception and Decision-making Integration
- [CVPR 2023 best paper]